

Tanque Esteira Bluetooth com Arduino
E aí makers como andam os projetos?
No post de hoje vamos lhe ensinar a controlar seu tanque esteira via Bluetooth com arduino utilizando seu smartphone.
 Lembre-se que o céu é o limite, você pode acrescentar novos componentes ao projeto de maneira fácil com uma simples alteração no código.
Lembre-se que o céu é o limite, você pode acrescentar novos componentes ao projeto de maneira fácil com uma simples alteração no código.
Prepare suas ferramentas e vamos para mais um projeto.
Materiais necessários para montagem:
Segue a lista do material que será utilizado no tanque esteira, todos esses são encontrados na Loja virtual da Autocore Robótica.
1 – Chassi Robô Tanque com Esteira Lagarta;
1 – Módulo Bluetooth RS232 HC-05;
1 – Driver Motor Ponte H L298N;
1 – Buzzer 5V 12MM;
2 – Led Alto Brilho 5mm Branco;
1 – Resistor de 150 Ohm;
1 – Resistor de 100 Ohm;
Montagem:
Preste bastante atenção na montagem de seu projeto, pois se ocorrer erro pode ocasionar danos aos seus componentes.
Para montar seu veículo siga o esquema abaixo:

Para maiores detalhes sobre a utilização do módulo bluetooth, acesse o link abaixo:
Utilizando Módulo Bluetooth no Arduino
No exemplo estamos utilizando o modelo Uno, mas pode ser utilizada outra placa como o Nano, Leonardo ou Mega.
Pinos utilizados da Ponte H:
N1 = 10;
N2 = 9;
ENA = 11;
N3 = 6;
N4 = 5;
ENB = 3;
Para mais informações sobre a Ponte H acesse este link:
Aprenda a utilizar a ponte H L293D com Arduino
OBSERVAÇÕES:
> Atenção para não inverter a polaridade pois pode ocorre danos ao regulador de tensão de seu ARDUINO;
>Ao realizar a gravação do Arduino desconectar os pinos de conexão RX e TX;
Programa:
/*Projeto tanque esteira Bluetooth, controlado pelo app arduino my car
*/
// /\ // \\ ////\\\\\ \\\\\\////// //////// \\\\//// \\\\//// ///////
// /\ // \\ /\ // \\ // // \\ // \\ //
//\\ // \\ /\ // \\ // // \\ // \\ //
// \\ // \\ /\ // \\ // // \\ ////\\\\ ///////
////\\\\ // \\ /\ // \\ // // \\ // \\ //
// \\ // \\ /\ // \\ // // \\ // \\ //
// \\ /////\\\\\ /\ /////\\\\\ //////// ////\\// // \\ ///////
// Pinos do motor direito:
int N1 = 10;
int N2 = 9;
int ENA = 11; //Pino para regulagem de velocidade
// Pinos do Motor esquerdo:
int N3 = 6;
int N4 = 5;
int ENB = 3; //Pino para regulagem de velocidade.
// Definição de pinos dos periféricos:
const int ledF = 12 ; // Led's frontais.
const int ledT = 13 ; // Led's traseiros.
const int buzina = 4 ; // Buzzer.
const int BTState = 2; // Comunicação do Bluetooth.
// Variáveis.
int i = 0;
int j = 0;
int state_rec;
char state;
void setup() { //Funções que são executadas apenas quando inicia-se o programa.
// Definição de portas OUTPUT= Saída ----INPUT= Entrada.
pinMode(N1, OUTPUT);
pinMode(N2, OUTPUT);
pinMode(N3, OUTPUT);
pinMode(N4, OUTPUT);
pinMode(BTState, INPUT);
// Inicializa a comunicação serial.
// Na comunicação serial você pode ve os comandos enviados pelo smartphone.
Serial.begin(9600);
}
void loop() { // Funções que são executadas infinitamente.
if (digitalRead(BTState) == LOW) { // O carro para ao ser desconectado do Bluetooth.
state_rec = 'S';
}
if (state != 'S') {
Serial.print(state);
}
if (Serial.available() > 0) { // Salva os valores da variável 'state'
state_rec = Serial.read();
state = state_rec;
}
//Definições de direções do Veículo:
if (state == 'F') { // Ao receber o comando 'F' desloca-se para frente.
digitalWrite(N1, LOW);
digitalWrite(N2, HIGH);
analogWrite(ENA, 255);//Define velocidade do motor em 255.
//ESQUERDO
digitalWrite(N3, LOW);
digitalWrite(N4, HIGH);
analogWrite(ENB, 255);//Define velocidade do motor em 255.
}
else if (state == 'G') { // Ao receber o comando 'L' desloca-se para frente e direita.
digitalWrite(N1, HIGH );
digitalWrite(N2, LOW );
analogWrite(ENA, 255 );//Define velocidade do motor em 255.
//ESQUERDO
digitalWrite(N3, LOW);
digitalWrite(N4, HIGH);
analogWrite(ENB, 255);//Define velocidade do motor em 255.
}
else if (state == 'I') { // Ao receber o comando 'I' desloca-se para frente e esquerda.
digitalWrite(N1, LOW );
digitalWrite(N2, HIGH);
analogWrite(ENA, 255 );//Define velocidade do motor em 255.
//ESQUERDO
digitalWrite(N3, HIGH);
digitalWrite(N4, LOW);
analogWrite(ENB, 255);//Define velocidade do motor em 255.
}
else if (state == 'R') { // Ao receber o comando 'R' desloca-se para direita.
digitalWrite(N1, LOW );
digitalWrite(N2, HIGH );
analogWrite(ENA, 255 );//Define velocidade do motor em 255.
//ESQUERDO
digitalWrite(N3, HIGH);
digitalWrite(N4, LOW);
analogWrite(ENB, 255);//Define velocidade do motor em 255.
}
else if (state == 'L') { // Ao receber o comando 'G' desloca-se para esquerda.
digitalWrite(N1, HIGH );
digitalWrite(N2, LOW );
analogWrite(ENA, 255 );//Define velocidade do motor em 255.
//ESQUERDO
digitalWrite(N3, LOW);
digitalWrite(N4, HIGH);
analogWrite(ENB, 255);//Define velocidade do motor em 255.
}
else if (state == 'B') { // Ao receber o comando 'B' desloca-se para trás.
digitalWrite(N1, HIGH);
digitalWrite(N2, LOW);
analogWrite(ENA, 255 );
//ESQUERDO
digitalWrite(N3, HIGH);
digitalWrite(N4, LOW );
analogWrite(ENB, 255);
}
else if (state == 'S') { // Ao receber o comando 'S' não realiza movimentos.
digitalWrite(N1, LOW);
digitalWrite(N2, LOW);
//ESQUERDO
digitalWrite(N3, LOW );
digitalWrite(N4, LOW );
}
else if (state == 'V') {// Ao receber o comando 'V' aciona a buzina.
if (j == 0) {
tone(buzina, 1000);
j = 1;
}
else if (j == 1) {
noTone(buzina);
j = 0;
}
state = 'n';
}
else if (state == 'W') { // Ao receber o comando 'W' acende os leds frontais.
if (j == 0) {
tone(ledF, 1000);
j = 1;
}
else if (j == 1) {
noTone(ledF);
j = 0;
}
else if (state == 'U') { // Ao receber o comando 'U' acende os leds Traseiros.
if (j == 0) {
tone(ledT, 1000);
j = 1;
}
else if (j == 1) {
noTone(ledT);
j = 0;
}
}
}
}
Utilização do aplicativo:
O controle do tanque é feito por meio do App “Arduino Bluetooth RC Car”.
Download do app para smartphone com sistema Android
Ao iniciar o aplicativo será apresentada esta tela, nela você encontra os comandos para seu Tanque esteira.

1=Acender luz frontal;
2=Acender luz traseira;
3=Acionar buzina;
4=Ligar pisca alerta;
5=Menu;
6=Frente;
7=Trás;
8=Esquerda;
9=Direita;
10=Controlador de velocidade;
Menu:
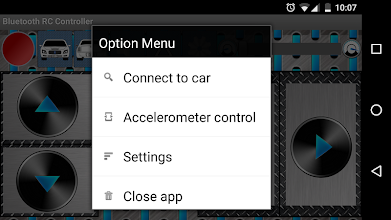
Connect to car: Conectar ao veículo;
Accelerometer control: Esta função você controla o carro por meio dos movimentos de seu telefone;
Settings: Configurações
Close app: Fechar app;
Conectando o Tanque esteira ao aplicativo:
Primeiramente Clique em “Connect to car” e siga os passos abaixo:
- Abra o Aplicativo;
- Configure de acordo com seu móculo;
- Acione a função Bluetooth de seu celular;
- Siga as Imagens abaixo:

Nessa aba escolha seu módulo Bluetooth que está interligado ao arduino:

Se todo procedimento estiver correto vai aparecer conectado no canto superior:

Por fim, este foi mais um projeto elaborado pela Autocore Robótica, qualquer dúvida, sugestões e erros deixe seu comentário logo Abaixo…



{kind=link}
{kind=link}
{kind=link}
{kind=link}
Deixe um comentário
